


厚壁封头坡口切割设备简介
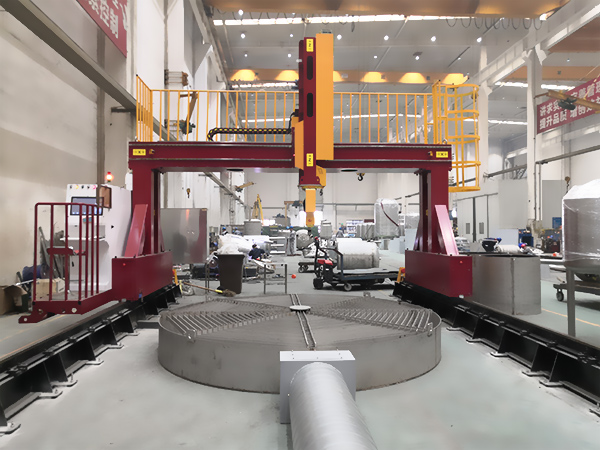
厚壁封头坡口切割设备采用数控龙门桁架式结构,X、Y、Z、U、V五轴伺服联动,X、Y、Z实现空间任意位置定位,U、V实现割枪任意姿态控制。本设备为一套封头全自动开孔切割机,用于椭圆形封头、碟形封头、半球封头的开孔切割热加工。可全自动、一次性连续完成封头上所有开孔切割工作,切割表面光滑、切割精度高,大量节省人工二次修正时间。
持封头类型:椭圆形封头、碟形封头、半球封头
支持开孔类型:中心孔、偏心竖直孔、偏心法向孔、偏心与竖直方向成偏转角度的孔

厚壁封头坡口切割设备优势
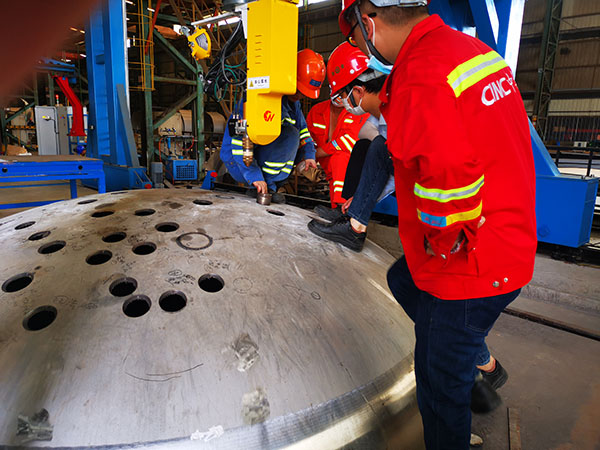
装备智能化、封头任意摆放、视觉扫描自动定位封头位置,无需工装夹具。开孔质量高、切割精度高、表面光滑, 切割后无需人工修正和打磨。
生产效率高、全自动、一次性连续完成封头上所有孔的切割动作,相比人工切割效率提升10倍以上。

厚壁封头坡口切割设备结构
坐标轴定义:
X轴:龙门横梁上的移动小车定义为X轴
Y轴:龙门沿导轨移动方向定义为Y轴
Z轴:立柱升降方向定义为Z轴
U轴:机头沿回转支撑旋转定义为U轴
V轴:割枪绕水平轴偏摆定义为V轴
厚壁封头坡口切割设备各轴结构
X、Y、Z采用高精度齿轮、齿条传动,直线导轨定位,U轴采用行星齿轮传动,V轴采用多级齿轮传动。
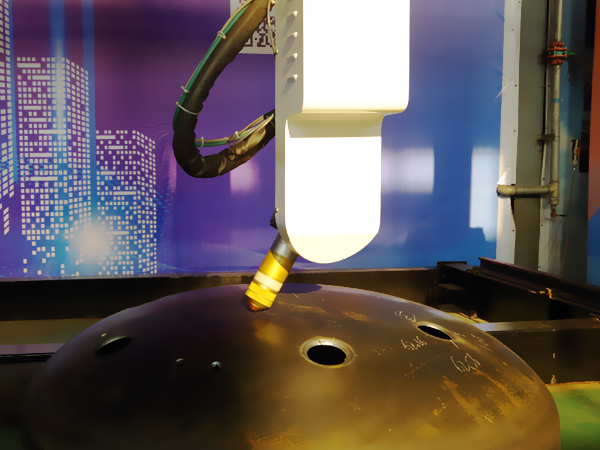
机头由回转轴和偏摆轴组成,可以实现割枪任意姿态控制,完成空间坡口切割任务。割枪安装座上安装有激光视觉轮廓测量传感器,与割枪同步旋转。机头部分结构
厚壁封头坡口切割设备操作
1、机器人系统配有示教编程器和日常操作启动台,另外考虑到机器人示教过程中的设备,在割枪后端配置了碰撞传感器,等离子切割枪总成(包括枪、嘴、表、阀)为设备。
2、机器人系统本体为模块化设计结构、维护性好、方便。采用的新型交流伺服电机具有结构紧凑、高输出、响应快、高可靠性等特点,具有较大的运动空间、更好的稳定性和较高的重复定位精度。
3、切割机器人气割系统采用三路供气方式(切割、预热、燃烧气),工作时利用预热等离子加热切割区并送进高纯度切割氧流,借助氧与铁的反应使金属迅速氧化,同时用高速切割氧流的动量将熔渣排除,从而实现对工件坡口的切割作业。
4、控制系统采用分布式硬件结构和精简指令集软件,能保证严格的时序和任务的执行。记忆容量达到160000步。开放式结构,可以与Ethernet、Device-net等网络进行连接。
5、切割机器人系统配有6.5inch屏幕彩色LCD显示的编程器,具有在线参数修改和故障自诊断显示功能。可转换中/英文显示方式,方便操作者。并且安装有dead-man开关,其一步保证