锥形封头坡口切割机器人简介
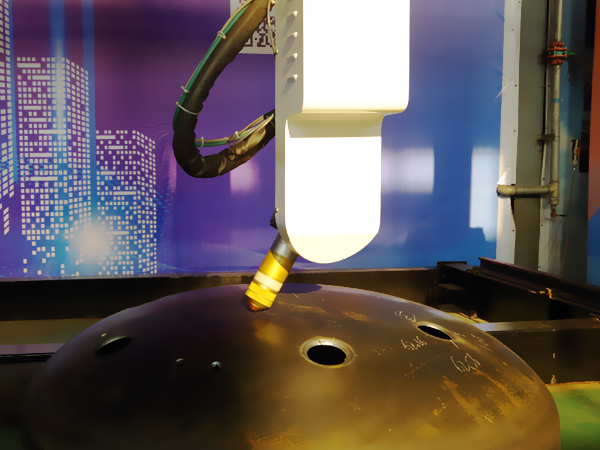
锥形封头坡口切割机器人采用数控龙门桁架式结构,X、Y、Z、U、V五轴伺服联动,X、Y、Z实现空间任意位置定位,U、V实现割枪任意姿态控制。本设备为一套封头全自动开孔切割机,用于椭圆形封头、碟形封头、半球封头的开孔切割热加工。可全自动、一次性连续完成封头上所有开孔切割工作,切割表面光滑、切割精度高,大量节省人工二次修正时间。
锥形封头坡口切割机器人优势
装备智能化、封头任意摆放、视觉扫描自动定位封头位置,无需工装夹具。
开孔质量高、切割精度高、表面光滑, 切割后无需人工修正和打磨。
生产效率高、全自动、一次性连续完成封头上所有孔的切割动作,相比人工切割效率提升10倍以上。
封头切割机器人为多轴联动的机器人切割应用系统,主要由机器人底座、机器人关节本体、等离子切割系统、防护系统、周边附件,控制系统等组成。
根据各种行业不同的应用,该机可设计成龙门倒挂式或座式结构。
也可将机器人关节安装在可以纵向移动的行走轨道上,使机器人整体作平面Y方向移动,可大大扩展机器人的工作区域。
封头切割机器人主要应用于各种封头、3D曲面的等离子切割,以及各种金属材料的3D坡口角度切割等行业应用。
切割材料包括各种碳钢、不锈钢以及各种合金材料,适用范围广。
本机型采用单工位或双工位设计,具有较快的加工效率。
封头切割机器人搭载等离子切割切割技术,切割速度快。可采用示教编程工艺,也可采用离线编程技术,具有可视操作界面,软件中储存了各种切割模块和参数,操作简单易懂。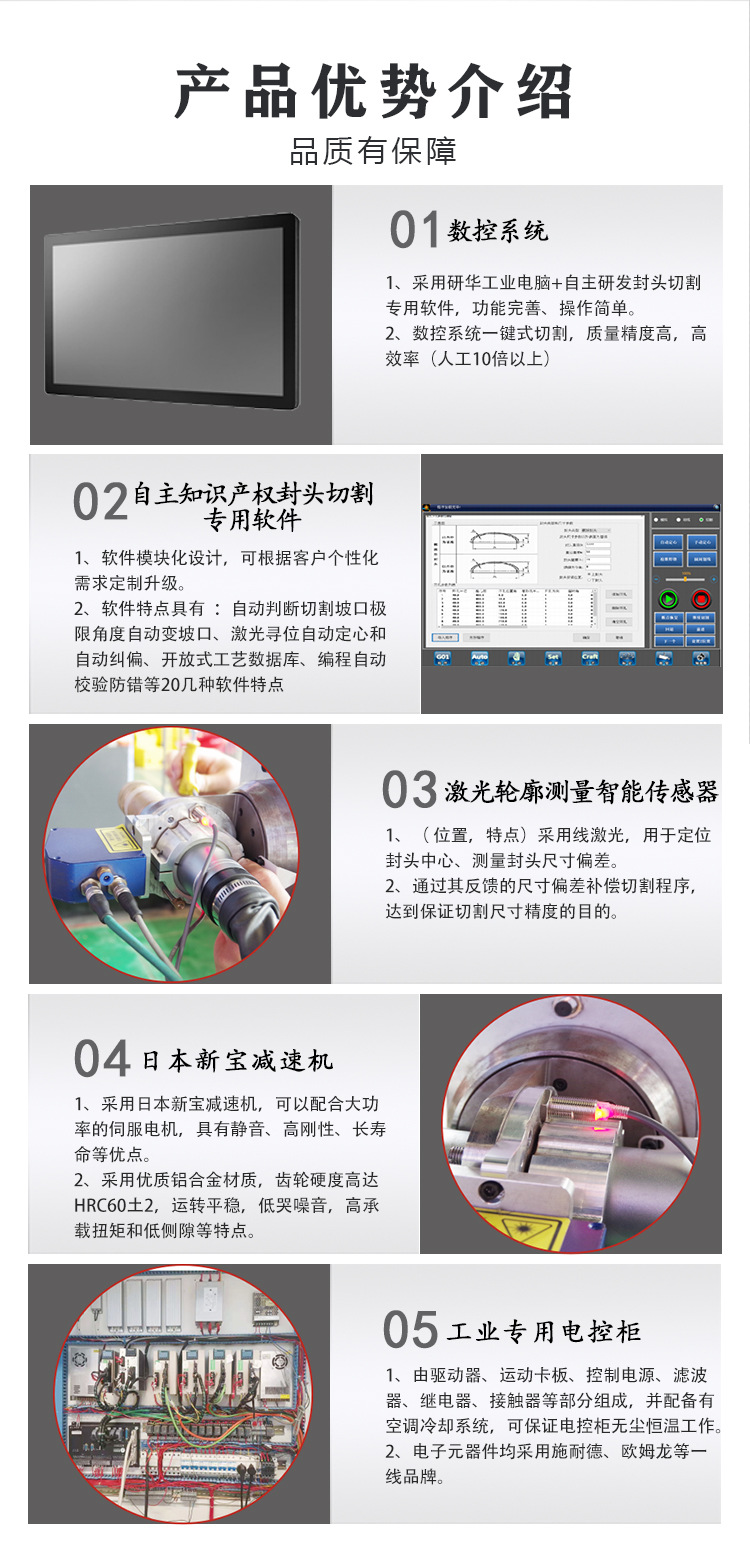
锥形封头坡口切割机器人结构
坐标轴定义:
X轴:龙门横梁上的移动小车定义为X轴
Y轴:龙门沿导轨移动方向定义为Y轴
Z轴:立柱升降方向定义为Z轴
U轴:机头沿回转支撑旋转定义为U轴
V轴:割枪绕水平轴偏摆定义为V轴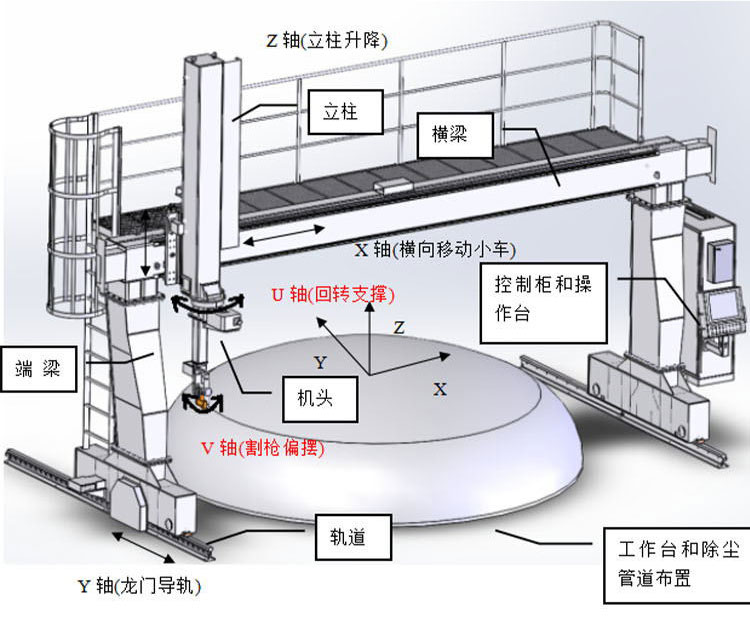
锥形封头坡口切割机器人各轴结构
X、Y、Z采用高精度齿轮、齿条传动,直线导轨定位,U轴采用行星齿轮传动,V轴采用多级齿轮传动。
机头由回转轴和偏摆轴组成,可以实现割枪任意姿态控制,完成空间坡口切割任务。割枪安装座上安装有激光视觉轮廓测量传感器,与割枪同步旋转。机头部分结构
锥形封头坡口切割机器人性能优势
采用六轴数控复合运动技术,以实现对各种曲线图形和焊接坡口同时切割成形;
该设备全系标配伺服系统,具有动态响速度快,运行平稳性,加工精度高等特性;
智能封头坡口切割机引入现代科学技术,开创智能切割机先河, 金属切割设备进入智能自动化时代。
当设备意外断电时,无论设备是否移动,均能自动记忆断电时的加工位置,再通电时可在原加工坐标点继续完成后续加工程序;
断弧自动回退功能,当数控系统检测到断弧后,将自动指令设备回退至断弧时的位置然后自动起弧进行再加工程序;
智能封头坡口切割机具有工作台辅助测平功能,可测出工作台与加工平面的不平行度。给调增与设备的平行度提供可靠参数。
机型宽大的结构设计,可直接使用专用的等离子或高精细等离子的割 和夹具同时也可应用为封头切割机,对椭圆形封头、蝶形封头、球形封头、油罐封头和压力容器封头等不同封头的不同尺寸进行加工。
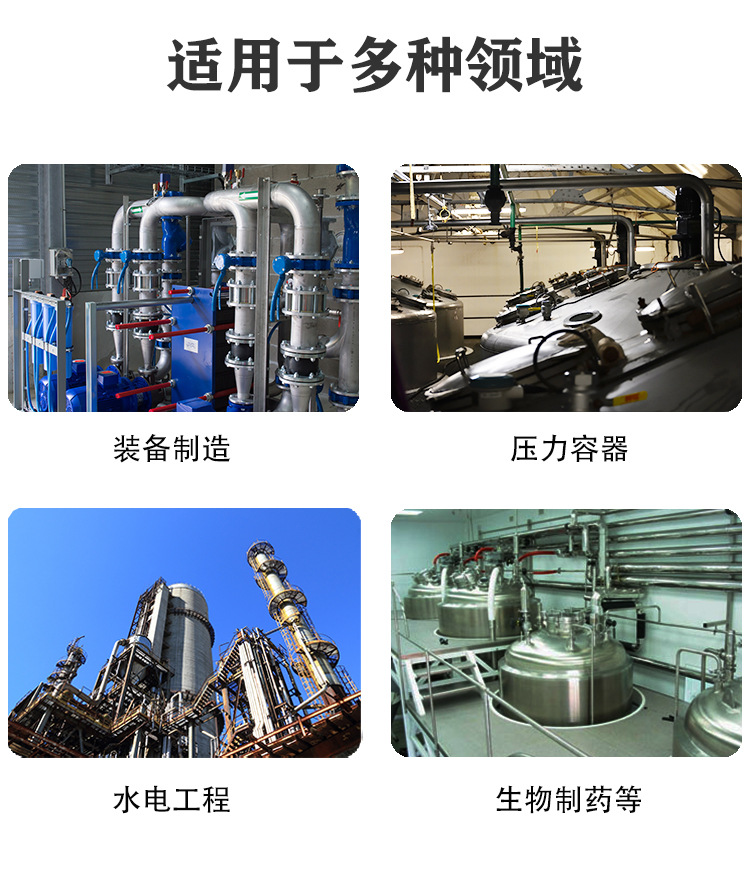
锥形封头坡口切割机器人应用领域